
can通信和串口通信区别
CAN通信和串口通信在多个方面存在显著的区别,以下是它们之间的主要差异:
一、通信协议和应用场景:
CAN通信:是一种高速、可靠和灵活的通信协议,用于在工业自动化设备之间传输数据。它特别适用于需要快速传输大量数据的应用,如车辆控制系统和工业自动化设备。
串口通信:是一种简单的通信协议,用于在不同设备之间传输数据。它主要是一种点对点通信方式,只能在两个设备之间传输数据,且主要用于低速、低容量的数据传输应用,如控制面板和传感器。
二、通信方式和速度:
CAN通信:采用基于ID的数据帧传输方式,可以在不同的设备之间传输多达8个字节的数据。通信速度较快,通信速率可以达到1Mbps,满足大部分实时应用的需求。
串口通信:数据位的传输按位顺序执行,最少只需一根传输线即可完成。其成本较低,但传输速度较慢。
三、通信特点和灵活性:
CAN通信:具有多主控制的特点,在总线空闲时,所有的单元都可开始发送消息。其通信协议相对简单,易于实现和维护。同时,CAN总线还支持多种拓扑结构,包括总线型、星型和混合型,并支持节点的热插拔和自动识别功能,可以方便地增加或减少节点。此外,CAN总线还具有高带宽、实时性和自动错误检测和纠正功能。
串口通信:虽然成本低,但速度和容量都有限制。串口通信的数据格式包括起始位、数据位、校验位、停止位、波特率等几个参数。
四、传输方式和距离:
CAN通信:支持远距离通信,最远可达1km。
串口通信:通信距离可以从几米到几千米。
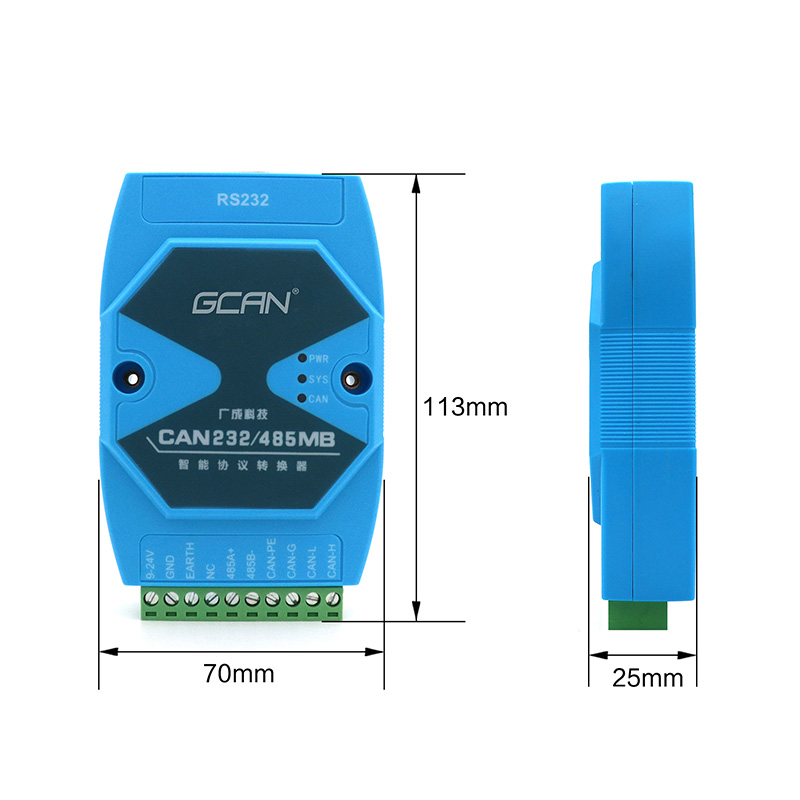
如果您需要能够实现CAN通讯与串口通讯相互转换的网关,可以打电话13019325660找我。
晚上,我们“广成工控”直播间也会聊相关内容,欢迎观看。
一、通信协议和应用场景:
CAN通信:是一种高速、可靠和灵活的通信协议,用于在工业自动化设备之间传输数据。它特别适用于需要快速传输大量数据的应用,如车辆控制系统和工业自动化设备。
串口通信:是一种简单的通信协议,用于在不同设备之间传输数据。它主要是一种点对点通信方式,只能在两个设备之间传输数据,且主要用于低速、低容量的数据传输应用,如控制面板和传感器。
二、通信方式和速度:
CAN通信:采用基于ID的数据帧传输方式,可以在不同的设备之间传输多达8个字节的数据。通信速度较快,通信速率可以达到1Mbps,满足大部分实时应用的需求。
串口通信:数据位的传输按位顺序执行,最少只需一根传输线即可完成。其成本较低,但传输速度较慢。
三、通信特点和灵活性:
CAN通信:具有多主控制的特点,在总线空闲时,所有的单元都可开始发送消息。其通信协议相对简单,易于实现和维护。同时,CAN总线还支持多种拓扑结构,包括总线型、星型和混合型,并支持节点的热插拔和自动识别功能,可以方便地增加或减少节点。此外,CAN总线还具有高带宽、实时性和自动错误检测和纠正功能。
串口通信:虽然成本低,但速度和容量都有限制。串口通信的数据格式包括起始位、数据位、校验位、停止位、波特率等几个参数。
四、传输方式和距离:
CAN通信:支持远距离通信,最远可达1km。
串口通信:通信距离可以从几米到几千米。
如果您需要能够实现CAN通讯与串口通讯相互转换的网关,可以打电话13019325660找我。
晚上,我们“广成工控”直播间也会聊相关内容,欢迎观看。




